. . . Анализатор работает с адаптером HDP и использует LIN протокол второй версии. Адаптер подключается к-линией к LIN, питание адаптера 12 или 24 вольта. Анализатор поддерживает оба варианта полсчёта контрольной суммы - классический и расширенный (выбирается в интерфейсе
classic - enhanced). Приёмный буфер позволяет записать до 3199 сообщений. Передающий буфер до 64 сообщений. Анализатор позволяет выбрать любую из 8 доступных скоростей шины:
2400, 9600, 10400, 14400, 15600, 20000, 38400 кбит/сек. В качестве интерфейса используется программа
Can analazer Ver 2.5 и выше.
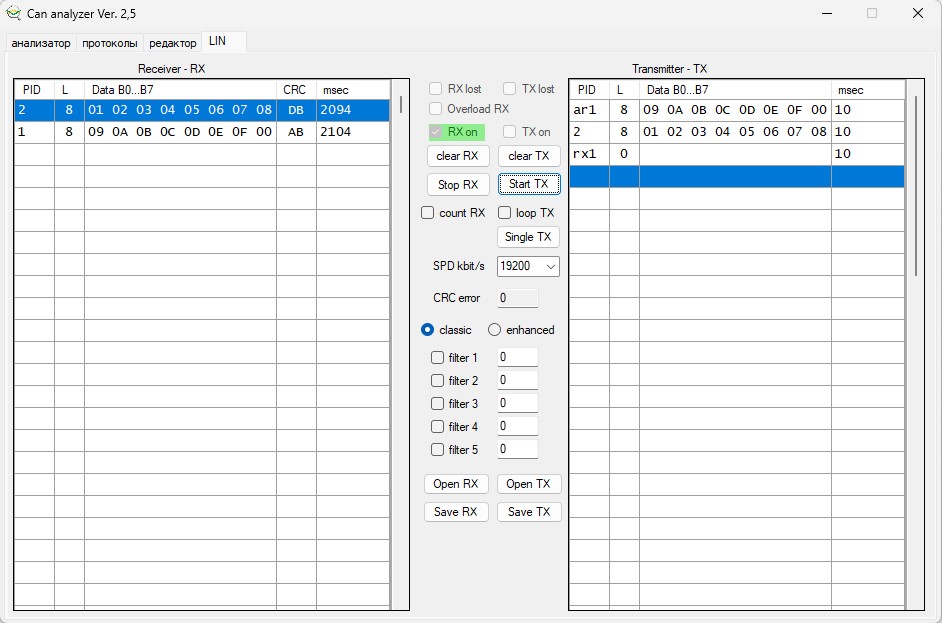
. . . Приёмный буфер в интерфейсе отображается таблицей в левой части. Включается приёмник кнопкой
Start RX, отключается кнопкой
Stop RX. Приёмный буфер может работать в одном из двух режимах. Последовательный режим записывает все сообщения из шины в ячейки буфера подряд. Каждая ячейка отображает PID сообщения, количество принятых байт данных кроме контрольного байта - CRC, байт или байты данных до 8, CRC и время принятого сообщения в миллисекундах. После полного заполнения буфера приёмник отключается с подсвечиванием надписи
Overload RX. Заново включить приёмник возможно только после затирания буфера кнопкой
Clear RX. Накопительный режим включается установкой птички на надписи
count RX. В накопительном режиме в буфер записываются только сообщения с новым PID. Сообщения, PID которого уже записан в буфере, переписывается. Ячейка отображается так же как и в последовательном режиме, но вместо времени принятого сообщения выводится инкрементный счётчик принятого сообщения. Приёмный буфер может принимать только нужные сообщения. Для этого есть 5 фильтров для установки нужного PID сообщения. Весь приёмный буфер можно сохранить кнопкой
Save RX или открыть из файла кнопкой
Open RX.
. . . Передающий буфер в интерфейсе отображается таблицей в правой части. Запустить передачу можно кнопкой
Start TX. Если перед надписью
loop TX установлена птичка, передача сообщений из буфера будет происходить циклически до момента нажатия кнопки
Stop TX. Кнопка
Single TX передаёт одно выбранное сообщение из буфера в шину. Ячейка передающего буфера отображает PID сообщения, количество байт данных, кроме CRC, байт или байты данных до 8, и период передачи сообщения в миллисекундах. Контрольная сумма CRC рассчитывается автоматически. Удалить выбранную ячейку можно через клавиатуру кнопкой
DEL, или выпадающий список после щелчка правой кнопки мыши на выбранной ячейке. Активация заполнения ячейки передающего буфера происходит двойным щелчком левой клавиши мыши. Щелчки на пустой ячейке заполняет её, щелчки на заполненной ячейке редактирует её.
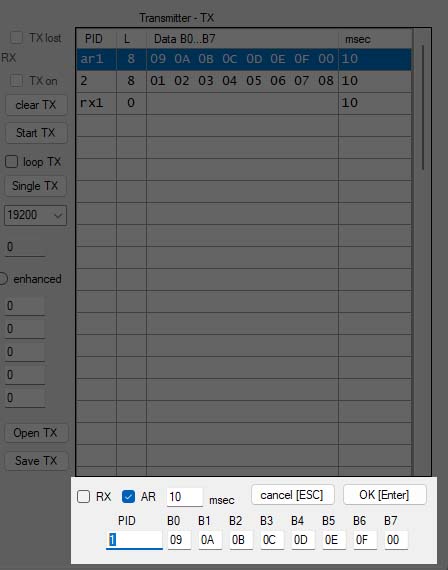
. . . Форма заполнения ячейки открывается под передающей таблицей. Она позволяет ввести PID сообщения, байты данных, период отправки и тип сообщения. Количество байт данных определяется заполнением окошек
B0-B7. Например если будут заполнены окошки B0-B3, а B4-B7 останутся пустые, в буфер запишется сообщение с 4 байтами данных. Тип сообщения может быть стандартным, запрашиваемым (после установки птички на надписи
RX) и ответным (после установки птички
AR). Стандартное сообщение передаётся полностью. Запрашиваемое сообщение передаёт только PID, данные должно передать Slave устройство на шине, которое ожидает запрос с этим PID. Данные ответного сообщения передаются только после получения приёмником PID, который указан в ответном сообщении. Весь передающий буфер можно сохранить кнопкой
Save TX или открыть из файла кнопкой
Open TX.
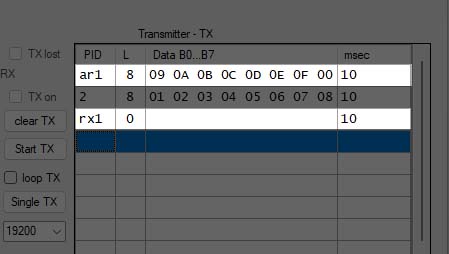
. . . Фото выше для примера. Первая ячейка с PID ar1 пропускается. Вторая ячейка с PID 2 передаётся полностью с 8 байтами данных и CRC. Через 10 мсек третья ячейка rx1 отправляет в шину только PID 1. Как только на шине закончится передача PID 1, передатчик отправит в шину 8 байт данных и CRC из первой ячейки с PID ar1.



 19.02.2026, 22:12
19.02.2026, 22:12


 Анализатор и программируемый интерфейс CAN шины
Анализатор и программируемый интерфейс CAN шины



 Комбинированный вид
Комбинированный вид
